研究内容
私は,マイクロホンアレーを用いた音響信号処理に関する研究を行っています.マイクロホンアレーとは,
下図の左側にあるマイクロホンを複数用いた収音システムのことです.
マイクロホンアレーは,各マイクロホンの位置の違いを利用することで,空間的な信号処理が可能です.
例えば,話者の方向を推定する音源定位,複数の話者が混在した音声を個々の音声に分離する音源分離,
移動する話者を追尾する音源追尾などがあります.その中でも私は,音源追尾に関する研究を行っています.
音源追尾は,音源定位を短時間毎で逐次的に行うことで実現できます.音源追尾技術は,
ロボットが話者の方向へ振り向いたり,話者方向の音声を強調して周囲の雑音を抑圧するのに用いられます.
また,移動する音源は複数で全方位に存在することが想定されます.そのため,全方位複数音源追尾技術が要求されます.
直線型のマイクロホンアレーでは前後方向の区別が出来ないため,下図の右側にある円形に配置したマイクロホンアレーを用います.
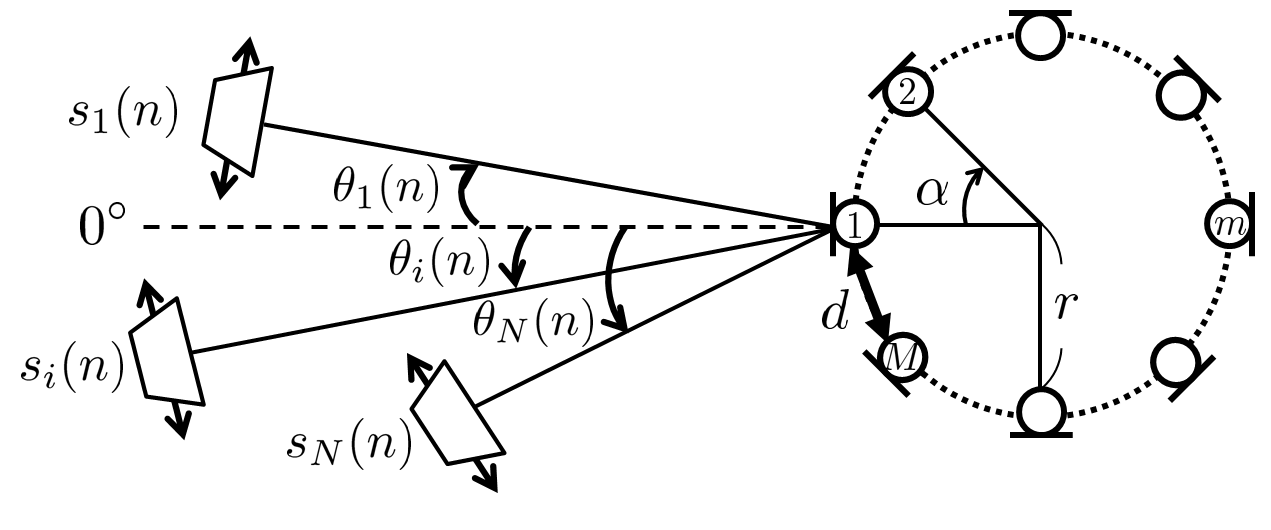
この図は,M個のマイクロホンでN個の音源信号を受音するモデル図です.このとき,各マイクロホンの受音信号には,
マイクロホンの位置の違いにより到達時間差が生じます.例えば,i番目の音源信号は,2番目のマイクロホンよりも
1番目のマイクロホンへ早く到達します.到達時間差は,以下の式で求められます.

ここで,dはマイクロホン間隔,mはマイクロホン番号,αは隣接したマイクロホン間のなす角,cは音速でこれらはすべて既知です.
よって,受音信号から到達時間差を求めることで,音源方向を推定することができます.